
มาดูกันครับว่าเจ้าหุ่น BB-8 จากภาพยนตร์ยอดนิยมที่กำลังเป็นกระแสอยู่ตอนนี้อย่าง Star Wars นั้นทำงานยังไงกันครับ

ภาพยนตร์ที่เป็นกระแส และถูกพูดถึงมากที่สุดในตอนนี้ คงจะหนีไม่พ้น Star Wars Episode VII – The Force Awakens
และเชื่อเหลือเกินว่าผู้ชมที่ได้ชมภาพยนตร์เรื่องนี้แล้ว ก็คงจะหลงเสน่ห์ของเจ้าหุ่นทรงกลมที่มีชื่อว่า BB-8 (บีบีเอท) แน่ๆ
แต่ก่อนจะอธิบายการทำงานของเจ้าหุ่นตัวนี้นั้น . . . เรามาทำความรู้จักกับเจ้าบีบีเอทกันก่อนดีกว่าครับ
มาทำความรู้จักเจ้าหุ่น BB-8 กันเถอะ
บีบีเอท เป็นตัวละครหุ่นยนต์ประเภทดรอยด์ (astromech droid) จากภาพยนตร์ Sci-Fi สุดยอดสงครามอวกาศอย่าง Star Wars Episode VII – The Force Awakens
โดยรูปร่างของมันมีรูปร่างคล้ายลูกบอล ที่มีหัวเป็นรูปโดม ซึ่งคล้ายกับหุ่นดรอยด์ซีรี่ R2 (ตัวที่เป็นที่รู้จักมากที่สุดของผู้คน คือ R2-D2)
ส่วนลำตัวที่มีรูปทรงเหมือนลูกบอลนั้นอยู่แยกต่างหากจากส่วนหัวอย่างเป็นอิสระ ซึ่งอยู่ใกล้กับแกนกลางแนวดิ่งของหุ่นดรอยด์
หุ่นตัวนี้ ปรากฏตัวครั้งแรกบนทะเลทรายของดาวจั๊กคู (desert planet of Jakku)
คอนเซ็ปของเจ้าหุ่น BB-8 เป็นยังไง?

J.J. Abrams (ผู้กำกับ) ต้องการทำภาพยนตร์เรื่องนี้ให้ออกมาให้ดูสมจริง เหมือนมีชีวิต และสัมผัสได้จริง ซึ่งการที่จะทำให้เป็นอย่างนั้นได้ ทางทีมงานผลิตต้องใช้ effect มากที่สุด เท่าที่จะเป็นไปได้
และเจ้าหุ่นบีบีเอทก็เช่นกันที่ถูกจับใส่ effect แบบจัดเต็มแบบไม่มีข้อยกเว้น
โดยภาพสเก๊ตแรกของบีบีเอทถูกเปิดตัวในงาน Star Wars Celebration 2015 และแน่นอนว่า มันไม่ใช่ผลงานของ Ralph McQuarrie (แต่เป็นไปได้ที่คอนเซ็ปและแนวคิดอาจจะเป็นของ McQuarrie)
ในการสัมภาษณ์ของแหล่งข่าววงในของ Star Wars นั้นบอกเอาไว้ว่า ศิลปินที่รับผิดชอบเกี่ยวกับคอนเซ็ปของตัวภาพยนตร์ดั้งเดิมนั้น คิดเอาไว้ว่าจะมีการออกแบบหุ่นใหม่โดยอิงรูปร่างจากหุ่น R2-D2 แต่ให้มันเป็นหุ่นแบบกลิ้งไปมาแบบลูกบอล (rolling droid)
คอนเซปของหุ่นกลิ้งได้นั้นฟังดูน่าสนใจ แต่มันก็ซับซ้อนใช่ย่อยเลย ซึ่งโจทย์ใหญ่ๆเลย คือ ทีมงานจะทำให้เจ้าหุ่นดรอยด์ออกมายังไงกันแน่? (ทีม CG ต้องการสร้าง CG แต่ผู้กำกับ J.J. Abrams ต้องการให้มันออกมาเป็นพร๊อพจริงๆ)
และแล้ว Pinewood Studio ก็ลองทำออกมาดู และในที่สุด พวกเขาก็สามารถสร้าง และหาคนมาเชิดหุ่นบีบีเอทลงในภาพยนตร์ได้สำเร็จ
เทคโนโลยีของหุ่น BB-8

แล้วไอ้เจ้าบีบีเอทมันทำงานยังไงกันแน่ล่ะ? (แน่นอนว่า มันไม่ได้ใช้กำลังจากแรงงานหนูแฮมสเตอร์อย่างที่บางทฤษฎีกล่าวไว้แน่นอน)
สิ่งที่ทำให้เจ้าหุ่นอ้วนกลมทำงานได้ คือ Sphero Ball ซึ่ง Sphero (1 ใน 10 startup ที่ได้เงินสนับสนุนดิสนีย์ในปี 2014) โดย CEO ของดิสนีย์ เข้าไปนั่งเป็นตำแหน่งที่ปรึกษาภายในของ Sphero
และเมื่อเขาพบว่ามีผู้ผลิตภาพยนตร์พยายามที่จะสร้างหุ่นดรอยด์ที่กลิ้งไปกลิ้งมาได้ เขาก็รู้ได้ทันทีว่าจะให้ใครเป็นผู้พัฒนาเจ้าหุ่นตัวดังกล่าว
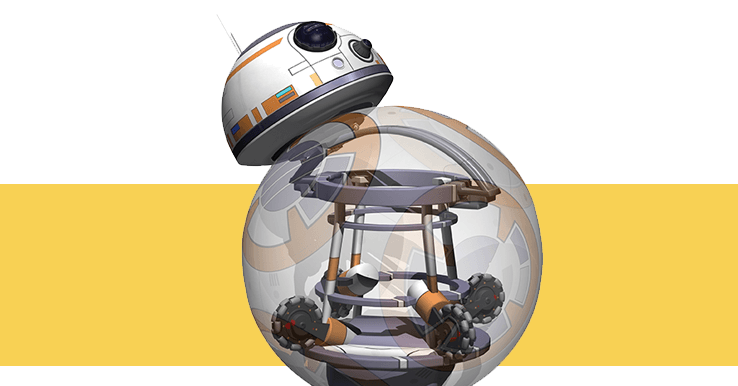
หุ่นบีบีเอท กับ Sphero นั้นดูเหมือนว่าจะใช้กลไกการทำงานภายในที่เหมือนกัน โดยหุ่นยนต์ดังกล่าวใช้ gyroscope ที่ใช้ในการตัดสินใจว่าต้องมุ่งหน้าไปทางทิศไหน และมีล้อ 2 ล้อภายในลำตัวเป็นตัวขับเคลื่อนให้ตัวทรงกลมเคลื่อนที่
ตัวฐานประกอบไปด้วยแบตเตอรี่ เป็นส่วนที่ใช้ส่วนถ่วงน้ำหนัก
ส่วนหัว ถือเป็นอีกส่วนที่น่าทึ่ง ซึ่งจากสิทธิบัตรที่จดโดย ทีมวิจัยและพัฒนาจินตวิศวกรรมของดิสนีย์ ได้ให้ความสำคัญกับส่วนหัวเช่นกัน
มีเรื่องที่น่าประหลาดใจเกี่ยวกับเจ้าหุ่นตัวนี้ ซึ่งถูกจดสิทธิบัตรไว้ตั้งแต่ปี 2010 แล้ว ซึ่งเป็นเวลา 2 ปีก่อนที่ดิสนีย์จะซื้อกิจการ Lucasfilm และ 4 ปีก่อนที่พวกเขาจะลงทุนใน Sphero ซึ่งดูเหมือนว่าเจ้าหุ่นยนต์ดรอยด์กลมกลิ้งจะมีมาตั้งนานกว่าที่ใครจะสังเกตเห็น
สิทธิบัตรเกี่ยวกับหุ่นยนต์ตัวนี้

มีสิทธิบัตรเลขที่ US 8269447 B2 (Magnetic Spherical Balancing Robot drive) ที่น่าจะใกล้เคียงกับเจ้าหุ่นกลมกลิ้งตัวนี้
อย่างแรกที่ได้เรียนรู้จากสิทธิบัตรตัวนี้ คือ คอนเซปของการออกแบบหุ่นยนต์ที่เรียกว่า holonomic motion
การเคลื่อนไหวภาคพื้นดินของหุ่นยนต์ holonomic ที่สามารถเคลื่อนไหวในแนวราบได้ (แนวนอน) และสามารถตอบสนองได้ดี ซึ่งทั้ง Sphero และ บีบีเอท ก็เป็นหุ่นยนต์ holonomic ทั้งคู่
ซึ่งสิทธิบัตรดังกล่าวนั้นแสดงให้เห็นถึงนวัตกรรมต่างๆที่หลากหลาย ซึ่งมันมีความคล้ายหุ่นบีบีเอทพอสมควร
จากการดูโครงสร้างภายนอก ลำตัวของหุ่นนั้นประกอบไปด้วยระบบไดรฟ์ที่เก็บตำแหน่งสัมพัทธ์ที่เหมือนกับทรงกลม
ระบบของหุ่นยนต์ตัวนี้ ใช้ล้อ omni จะช่วยให้ทรงกลมสามารถกลิ้งไปในทิศทางใดก็ได้
ล้อแต่ละล้อ เชื่อมต่อกับมอเตอร์ อีกทั้งใช้เซนเซอร์ ทั้ง gyroscope และเครื่องวัดความเร่ง ซึ่งใช้ในการตัดสินใจในเรื่องทิศทางและการเคลื่อนที่
ระบบไดรฟ์สามารถบังคับและใช้งานเป็นรีโมทคอนโทรลได้ ตัวแผ่นที่ฐานรองเป็นส่วนที่ใช้ถ่วงน้ำหนัก ทำให้น้ำหนักส่วนกลางนั้นใกล้ชิดกับพื้นมากที่สุด ซึ่งดูยังไงก็เหมือนกับ Sphero
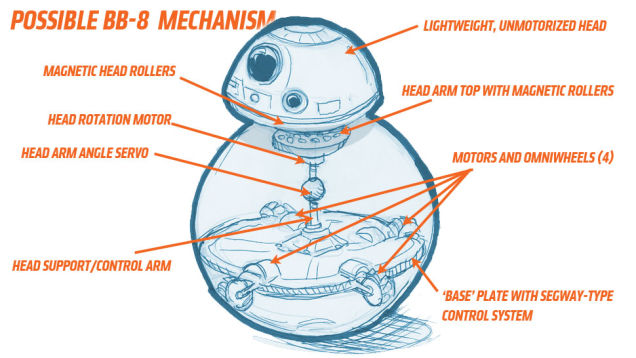
ส่วนสิ่งที่แตกต่างกันที่พบระหว่างหุ่นบีบีเอท กับ Sphero คือ ตัวเสาที่บังคับการเคลื่อนไหว ซึ่งถูกอธิบายเพิ่มเติมไว้ในตัวสิทธิบัตรแล้ว
ยังมีระบบควบคุมที่ควบคุมทุกอย่างให้สมดุล และทำให้แน่ใจว่าตำแหน่งของเสานั้นตั้งอยู่ในแนวดิ่งตลอดเวลา
แขนของมันสามารถหมุนได้ และข้อมูลที่ระบุไว้ในสิทธิบัตร มันสามารถตอบสนองกับสนามแม่เหล็กภายนอก นั่นหมายถึง หุ่นบีบีเอทนั้นถูกควบคุมโดยการตอบสนองกับสนามแม่เหล็ก
มีแม่เหล็กอยู่ที่ปลายเสา และ แม่เหล็กที่กลิ้งได้อยู่ที่ฐานของหัวหุ่นยนต์
หากต้องการดูข้อมูลเต็มๆเกี่ยวกับสิทธิบัตรตัวนี้ สามารถเข้าไปดูได้จาก ที่นี่ เลยครับ 🙂
ข้อมูลจาก : howbb8works










